


Regelungstechniklabor
Folgende Ausstattungen unterstützen uns bei der Forschungsarbeit:
-
µKRoS 316 Robotersysteme
- Staubli TX 90
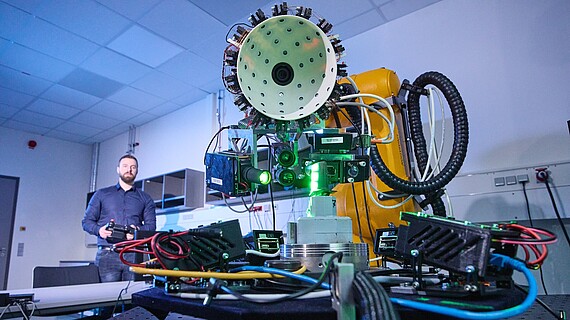
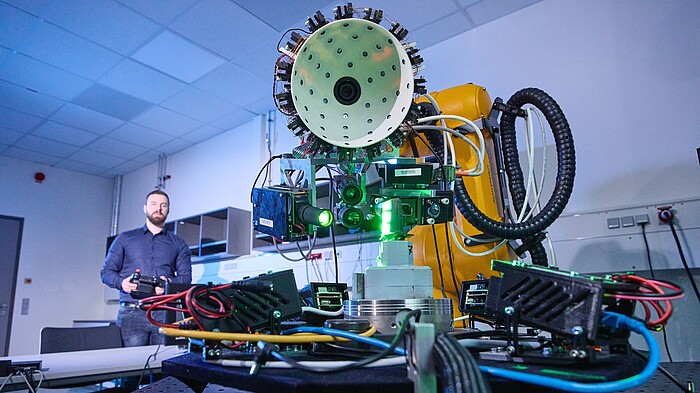
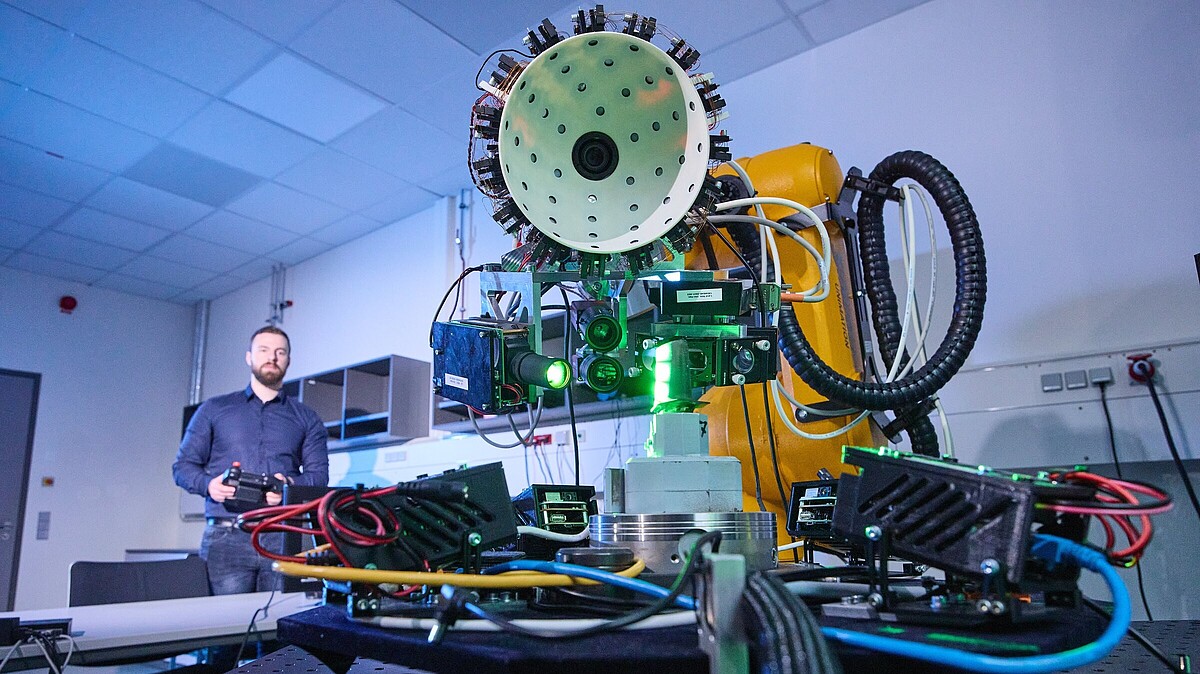
Multiskaliges Streifenprojektionssystem für Fügezonen
Im IMR wird die Entwicklung eines robotergeführten Multisensorsystems zur automatisierten 3D Erfassung von komplexen Geometrien erforscht. Die Messergebnisse der einzelnen Skalenbereiche werden zur Charakterisierung der Bauteilgeometrie in Hinblick auf Verschleißspuren und Schäden sowie der Bestimmung der Oberflächenbeschaffenheit durch Messung der Oberflächenmikrostrukturen genutzt. Das Messsystem wird im Rahmen der Eingangsbefundung und zwischen bearbeitenden Reparaturmaßnahmen zur Qualitätsbewertung eingesetzt.
Hauptkomponenten:
- verschiedene Kameras: High-Speed und hohe Auflösung
- entozentrische Objektive
- Low-Coherence-Interferometer
- BRDF-Sensor
Weitere Informationen unter: SFB871
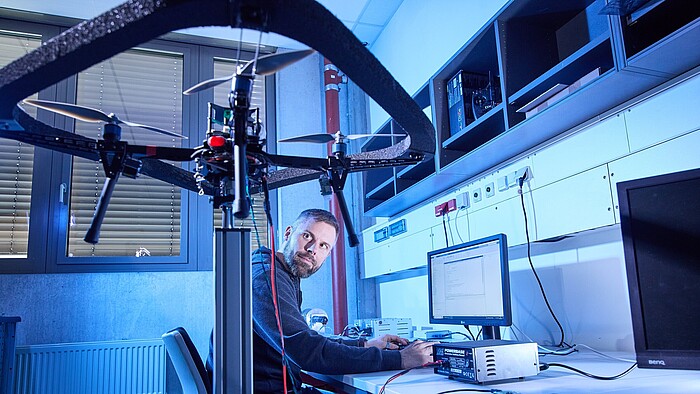
Quadrokopter Prüfstand


Mykros 316 Robotersysteme
Technische Daten:
- 6 Achsen mit 9 Motoren ohne Getriebe
- Interne Drehgeber mit Auflösung von 1 Bogensekunde
- Wiederholgenauigkeit 5 µm am Roboterendeffektor
- PID-Einzelachsregelung mit Geschwindigkeits- und Beschleunigungsvorsteuerung
- Anwendung für Mikrobearbeitung und Mikromontage (Mikro-Makro-Kinematik)
Anwendungsgebiete:
- Mikromontage
- Mikrobearbeitung
Mitarbeit an folgenden Forschungsprojekten:
- Makro-Mikro-Kinematik









