Forschungsprojekte
Regelungstechnik
-
Makro-Mikro-Kinematik zur MikromontageDer Schwerpunkt des Forschungsvorhabens liegt in der Erforschung von Methoden zum Aufbau eines Handhabungssystems, welches die aktorische Grundlage für ein klinikgerechtes, ultragenaues mechatronisches Assistenzssystem bilden soll. Ziel ist es dabei, eine Auflösung von 1 µm in einem Arbeitsvolumen von 10 mm³ zu erreichen, wobei das Arbeitsvolumen flexibel im Raum positioniert werden kann. Die technische Umsetzung erfolgt durch die Kopplung einer Piezoaktorik an einen 6-Achs-Präzisionsroboter (µKRoS316). Der Roboter übernimmt die Positionierung der Werkzeuge im gesamten Arbeitsbereich (Makro-Positionierung). Der Mikro-Positioniereinheit kommen Aufgaben wie Kompensation der Lage-Ungenauigkeiten des Roboters, Ausgleichen von Schwingungen und das hochgenaue Verfahren des Werkzeugs zu. Das Arbeitsprogramm lässt sich entsprechend der oben genannten Arbeitsschwerpunkte in fünf Bereiche gliedern: Entwurf einer gekoppelten Regelung Aufbau eines externes Messsystems zur Realtime-6D-Lagebestimmung Erforschung von Methoden zur Verbesserung der 6D-Lagegenauigkeit von Positioniereinheiten Matching der Koordinatensystemen von Positioniereinheiten und des Messsystems und Bahnplanung Entwicklung und Konstruktion des WerkzeugsatzesJahr: 2015
![]()
![]()
-
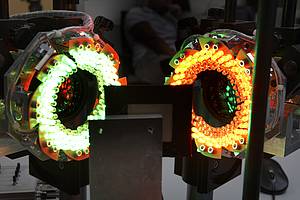
Regelungskonzepte bildverarbeitungsgestützter Bewegung eines ObjektesAm Institut für Mess- und Regelungstechnik wurde ein Versuchstand zur Stabilisierung eines 3D-inversen Pendels gebaut. Für die Bestimmung der Position des Pendels ist es notwendig die Positionen des Fußpunktes und der Spitze des Pendels zu ermitteln. Die Position der Spitze des Pendels – genau gesagt der weißer Kugel – wird mit Hilfe der Hochgeschwindigkeitskamera ermittelt. Die CMOS-Kamera macht 148 Bilder pro Sekunde. Der Zusammenhang zwischen den 2D-Bildkoordinaten und den 3D-Weltkoordinaten wird durch eine vorherige Kamerakalibrierung hergestellt. Die Position des Fußpunktes bzw. des Wagens wird über die Schrittmotoren ermittelt. Ziel der Regelung ist es, das Pendel in der stabilen aufrechten Lage an einer Position zu halten, im zweiten Schritt soll sich das Pendel auf eine Bahn – im Speziellen auf einem Kreis - stabil bewegen. Es werden ein PID-Regler, ein Regler mit Zustandsrückführung, ein MRAC- Regler (model reference adaptive control) mit Vollzustandrückführung und ein nichtlinearer Regler verwendet. Technisch wird die Steuerung mit Hilfe der xPC-Target Toolboxes von MATLAB realisiert. Die Regelungsalgorithmen werden vom Target-PC ausgeführt. Auf dem Host-PC wird lediglich die Bildverarbeitung ausgeführt und die Ergebnisse werden zum Target-PC durch die Ethernet-Verbindung geschickt. Diese Regelungskonzepte könnten für die Stabilisierung der Patienten in der Strahlentherapie verwendet werden.Jahr: 2015
![]()
![]()
-
Simultan-Lokalisation und Kartierung System unter Verwendung von LuftkameraGerade in den Bereichen der Roboternavigation, der Lokalisation und Kartierung, sowie im Augmented oder Virtual Reality hat in den letzten Jahren die Nachfrage nach Echtzeit-3D-Rekonstruktionsmethoden stark zugenommen. Ein vielversprechender Ansatz zur Implementierung von 3D-Rekonstruktionsmethoden ist das Prinzip des Simltaneous Localization and Mapping, kurz SLAM genannt. Das Ziel dieser Methode ist einerseits die 3D-Rekonstruktion der Umgebung und anderseits die zu ihr relative Lokalisierung und Verfolgung bewegender Objekte.Leitung: Dr.-Ing. Christian PapeTeam:Jahr: 2018Laufzeit: 01.01.2018 – 31.12.2020
![]()
![]()
-
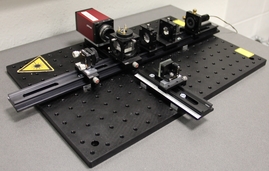
Robotergestützte Montage optischer Systeme mittels Prädiktor-Korrektor-VerfahrenDieses Forschungsprojekt beschäftigt sich mit dem funktionsorientierten Aufbau optischer Systeme und zielt darauf ab, die hohen geforderten Toleranzen sowohl der optischen Komponenten als auch der Positioniersysteme zu verringern. Des Weiteren soll auch eine geringere Ausschussrate optischer Komponenten während des Herstellungsprozesses gewährleistet werden.Leitung: Dr.-Ing Christian PapeTeam:Jahr: 2018
![]()
![]()



Akustik
-
Light weight IN-ear COmmunication headset with Active noise ReductionDas Forschungsprojekt LINCOAR (Light weight IN-ear COmmunication headset with Active noise Reduction) ist ein Auftragsforschungsprojekt der Firma Sennheiser electronic GmbH Co. KG, das durch den Europäischen Fonds für regionale Entwicklung und das Land Niedersachsen finanziell unterstützt wird. Es konzentriert sich auf die Entwicklung von In-Ohr-Kopfhörern mit aktiver Geräuschunterdrückung (ANC). An unserem Institut liegt der Forschungsschwerpunkt auf dem Regelungsentwurf mit adaptiven Algorithmen. Das Projekt gliedert sich in zwei Teilprojekte, die adaptive Feedforward-Regelung und die adaptive Feedback-Regelung. Im ersten Projekt wird ein adaptiver Feedback-Regler für die aktive Geräuschkontrolle bei In-Ear-Kopfhörern vorgeschlagen. Das Hauptproblem bei In-Ear-Kopfhörern besteht darin, dass der Sekundärweg von Person zu Person unterschiedlich ist. Basierend auf einer Identifikation des inversen Minimalphasenanteils der Strecke wird die Stabilität des Regelkreises verbessert und damit eine bessere Dämpfung ermöglicht. Die Effektivität dieses aktiven adaptiven Systems wird Simulationen und auch experimentelle Ergebnisse bestätigt Im zweiten Projekt einige Verbesserungen in Verbindung mit der adaptiven Feedforward-Regelung vorgestellt. Insbesondere wird der Nutzen von virtuellen Sensoren untersucht. Die Remote-Mikrofontechnik wird eingesetzt, um die Dämpfung am Trommelfell deutlich zu verbessern.Leitung: Dr. Ing. Christian PapeJahr: 2012
![]()
![]()
-
Positionsadaptive Ruhezone in geschlossenen RäumenIn der Umgebung großer Transformatoren oder rotierender Maschinen wie Flugzeugtriebwerken sind Menschen einem hohen und vor allem kontinuierlichen Lärmpegel ausgesetzt. Der emittierte – primär tieffrequente – Schall kann dabei durch das Tragen des üblichen passiven Gehörschutzes nur unzureichend gedämpft werden. In Flugzeugcockpits beispielsweise finden daher bereits aktiv wirkende Maßnahmen Anwendung, die den Triebwerkslärm an den Pilotenplätzen mittels sogenanntem Gegenschall reduzieren. Verfügbare aktive Lösungen sind jedoch entweder an feste Positionen gebunden oder machen das Mitführen entsprechender tragbarer Geräte (z.B. Kopfhörer) nötig. Im Rahmen des aktuellen Projekts wird dazu eine Feedforward-Steuerung entworfen, die mittels Gegenschall eine lokale Ruhezone automatisch an der gewünschten Position erzeugt. Hierfür wird die Methode des virtuellen Mikrofons angewandt und dessen Wirkposition adaptiv mittels Kamera-Tracking verschoben. Dabei ist die erreichbare Lärmreduktion am Ort der Ruhezone vor allem von der parametrischen Modellierung der Schalllaufwege (der Regelstrecken) abhängig, welche lokal stark variieren. Dies wird primär durch die Anwendung im geschlossenen Raum verursacht, dessen von Reflexionen geprägte Akustik sich im Frequenzgang der Strecken widerspiegelt und die Identifikation der Strecken zu einer besonderen Herausforderung macht.Leitung: Dr.-Ing. Christian PapeTeam:Jahr: 2020
![]()
![]()









