Regelungstechnik
Beschreibung der Arbeitsgruppe:
Die Arbeitsgruppe Regelungstechnik beschäftigt sich mit der Modellierung, Beobachtung und Regelung linearer unsicherer dynamischer Systeme. Die Unsicherheit bzw. das Informationsdefizit ergibt sich in der Praxis meist aus einer unvollständigen Modellierung, aus indirekten Messungen (Beobachtungen), aus stark fehlerbehafteten bzw. unvollständigen Messungen oder aus der Diskretisierung für den Digitalrechnereinsatz.
Die Regelstrecken setzen sich i.a. aus
- mechatronischen (z.B. Assistenzsysteme in der Fahrzeugtechnik),
- mikrooptoelektronischen (z.B. mikrooptisches Analysesystem),
- optomechatronischen (z.B. bildrückgeführte Regelung) und
- akustischen (z.B. "active noise control")
Systemen zusammen.
Beim Reglerentwurf werden sowohl lineare (z.B. H∞ Modifikationen), linear adaptive (z.B. Prädiktor/Korrektor Verfahren) oder nichtlineare (z.B. Lyapunov-Verfahren) Konzepte entwickelt und experimentell zum Einsatz gebracht. Im Zusammenhang mit Messunsicherheiten werden Fuzzy-Modelle und lineare wie nichtlineare Beobachtungsmodelle untersucht. Experimentelle Identifikationsverfahren, wie z.B. Frequenzkennlinienverfahren spielen bei großen Modellierungsdefiziten eine wichtige Rolle. Bei bildrückgeführter Regelung kommen darüber hinaus Problemfelder aus der mehrdimensionalen Signalverarbeitung wie Objekt- und Umfelderkennung hinzu.
Ansprechpartner


Regelungstechnik & Akustik
30823 Garbsen
Regelungstechnik & Akustik
Regelungstechnik
-
Makro-Mikro-Kinematik zur MikromontageDer Schwerpunkt des Forschungsvorhabens liegt in der Erforschung von Methoden zum Aufbau eines Handhabungssystems, welches die aktorische Grundlage für ein klinikgerechtes, ultragenaues mechatronisches Assistenzssystem bilden soll. Ziel ist es dabei, eine Auflösung von 1 µm in einem Arbeitsvolumen von 10 mm³ zu erreichen, wobei das Arbeitsvolumen flexibel im Raum positioniert werden kann. Die technische Umsetzung erfolgt durch die Kopplung einer Piezoaktorik an einen 6-Achs-Präzisionsroboter (µKRoS316). Der Roboter übernimmt die Positionierung der Werkzeuge im gesamten Arbeitsbereich (Makro-Positionierung). Der Mikro-Positioniereinheit kommen Aufgaben wie Kompensation der Lage-Ungenauigkeiten des Roboters, Ausgleichen von Schwingungen und das hochgenaue Verfahren des Werkzeugs zu. Das Arbeitsprogramm lässt sich entsprechend der oben genannten Arbeitsschwerpunkte in fünf Bereiche gliedern: Entwurf einer gekoppelten Regelung Aufbau eines externes Messsystems zur Realtime-6D-Lagebestimmung Erforschung von Methoden zur Verbesserung der 6D-Lagegenauigkeit von Positioniereinheiten Matching der Koordinatensystemen von Positioniereinheiten und des Messsystems und Bahnplanung Entwicklung und Konstruktion des WerkzeugsatzesJahr: 2015
![]()
![]()
-
Regelungskonzepte bildverarbeitungsgestützter Bewegung eines ObjektesAm Institut für Mess- und Regelungstechnik wurde ein Versuchstand zur Stabilisierung eines 3D-inversen Pendels gebaut. Für die Bestimmung der Position des Pendels ist es notwendig die Positionen des Fußpunktes und der Spitze des Pendels zu ermitteln. Die Position der Spitze des Pendels – genau gesagt der weißer Kugel – wird mit Hilfe der Hochgeschwindigkeitskamera ermittelt. Die CMOS-Kamera macht 148 Bilder pro Sekunde. Der Zusammenhang zwischen den 2D-Bildkoordinaten und den 3D-Weltkoordinaten wird durch eine vorherige Kamerakalibrierung hergestellt. Die Position des Fußpunktes bzw. des Wagens wird über die Schrittmotoren ermittelt. Ziel der Regelung ist es, das Pendel in der stabilen aufrechten Lage an einer Position zu halten, im zweiten Schritt soll sich das Pendel auf eine Bahn – im Speziellen auf einem Kreis - stabil bewegen. Es werden ein PID-Regler, ein Regler mit Zustandsrückführung, ein MRAC- Regler (model reference adaptive control) mit Vollzustandrückführung und ein nichtlinearer Regler verwendet. Technisch wird die Steuerung mit Hilfe der xPC-Target Toolboxes von MATLAB realisiert. Die Regelungsalgorithmen werden vom Target-PC ausgeführt. Auf dem Host-PC wird lediglich die Bildverarbeitung ausgeführt und die Ergebnisse werden zum Target-PC durch die Ethernet-Verbindung geschickt. Diese Regelungskonzepte könnten für die Stabilisierung der Patienten in der Strahlentherapie verwendet werden.Jahr: 2015
![]()
![]()
-
Bildrückgeführte Regelung eines optomechanischen Derotators zur Messung an rotierenden BauteilenRotierende Bauteile sind in einer Vielzahl von Maschinen verbaut. Um einen effizienten und sicheren Betrieb zu gewährleisten ist eine Überprüfung dieser unerlässlich. Dieses lässt sich am zuverlässigsten durch Messungen erreichen, insbesondere wenn diese berührungslos und während des eigentlichen Betriebs durchgeführt werden. So kann sichergestellt werden, dass die Ergebnisse nicht durch das Messsystem verfälscht werden.Leitung: Dr. Ing. Christian PapeTeam:Jahr: 2017
![]()
![]()
-
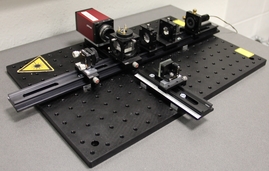
Robotergestützte Montage optischer Systeme mittels Prädiktor-Korrektor-VerfahrenDieses Forschungsprojekt beschäftigt sich mit dem funktionsorientierten Aufbau optischer Systeme und zielt darauf ab, die hohen geforderten Toleranzen sowohl der optischen Komponenten als auch der Positioniersysteme zu verringern. Des Weiteren soll auch eine geringere Ausschussrate optischer Komponenten während des Herstellungsprozesses gewährleistet werden.Leitung: Dr.-Ing Christian PapeTeam:Jahr: 2018
![]()
![]()
-
Simultan-Lokalisation und Kartierung System unter Verwendung von LuftkameraGerade in den Bereichen der Roboternavigation, der Lokalisation und Kartierung, sowie im Augmented oder Virtual Reality hat in den letzten Jahren die Nachfrage nach Echtzeit-3D-Rekonstruktionsmethoden stark zugenommen. Ein vielversprechender Ansatz zur Implementierung von 3D-Rekonstruktionsmethoden ist das Prinzip des Simltaneous Localization and Mapping, kurz SLAM genannt. Das Ziel dieser Methode ist einerseits die 3D-Rekonstruktion der Umgebung und anderseits die zu ihr relative Lokalisierung und Verfolgung bewegender Objekte.Leitung: Dr.-Ing. Christian PapeTeam:Jahr: 2018Laufzeit: 01.01.2018 – 31.12.2020
![]()
![]()